Екип от инженери от германския Изследователски институт "Фраунхофер" са разработили прототип на подводен робот, който ще помага за спасяването на хора от удавяне в басейните. Проектът е в сътрудничество с водоспасителната служба в град Хале, който се намира в източната част на страната и е посещаван от големи туристически групи.
"Има типични пози, по които може да познаете, когато някой е в опасност", споделя Хелге Ренкевиц, ръководител на иновативния проект.
Според плановете роботът ще се намира в подводна станция, която ще бъде разположена на дъното на басейна. Монтирани камери ще следят положението на посетители във водата, а при признаци на удавяне ще изпращат директен сигнал към робота. След това механизмите се задействат, подводната станция отваря врати, а машината се отправя към местоположението на удавника. След това човекът ще бъде изкаран на повърхността за рекордно кратко време. Механизмът е подобен на носилка и при нужда може да фиксира тялото на засегнатия, за да предотврати повторното му потапяне. Роботът е свързан към компютърна система с изкуствен интелект и оптични сензори.
Специалистите добавят, че системата може да бъде използвана и в други водни басейни например в езерата. В този случай камерите ще бъдат заменени от въздушни дронове. Оптичните сензори ще отстъпят мястото си на акустични, тъй като водата в езерата не е толкова чиста и видимостта е по-ограничена. Ехото от звуковите вълни може да се използва за по-бързото определяне на местоположението на изпадналия в беда.
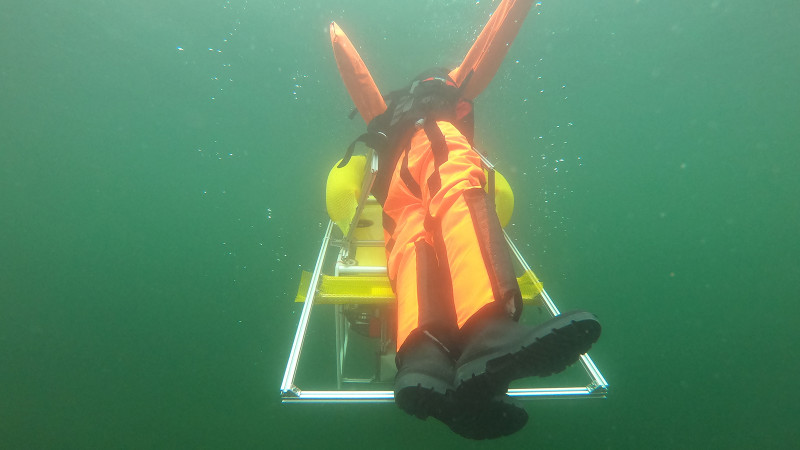
Проведени са тестове в езеро в град Хале, където бе потопен на 3 метра дълбочина манекен с тегло от 80 кг. Роботът се е справил успешно със задачата да закрепи манекена, да изплува на повърхността и да го транспортира на 40 метра разстояние до брега, където е чакал спасителен екип. Задачата е изпълнена за около 2 минути.
Системата е дълга 90 см., с височина и ширина от 50 см. Снабдена е с батерии, мотор, камери и оптични навигационни сензори. Екипът цели да изгради различни версии на робота, които да бъдат подходящи за използване в други водни басейни и да го направи по-лек от сегашния прототип. Следващите версии на системата ще могат да се използват за различни задачи – инспекции на язовирни стени, наблюдение на видовете в езерата, откриване и проверка на археологически артефакти на дъното.
Източник и снимка: Fraunhofer.de